Re-routing Straight Line Paths Around Barriers - A Visibility Graph Demo
reroute_demo.RmdThis vignette demonstrates the basic concept within the
{pathroutr} package for re-routing paths that cross a
barrier around said barrier using the shortest path (weighted by
distance) through a visibility graph.
The larger intent is to use this approach for adjusting the movement tracks of marine animals through water when estimated paths from movement models or other estimation approaches incorrectly cross land.
The Test Environment
First, let’s setup our test space with our included land barrier and points of interest. This was based off of the north Kodiak Island region in Alaska, USA (but, is not an exact replica. So, not for navigational use!!).
ggplot() +
ggspatial::annotation_spatial(data = land_barrier,
fill = "cornsilk3", size = 0) +
ggspatial::layer_spatial(data = poi) +
theme_void()
The complexity of the nearshore environment with small islands and narrow passages is a difficult situation for estimating marine animal tracks from telemetry devices that often have error associated with the location estimates.
Here, we sample 15 of our points of interest and, then, connect them as a line representing a path across our complicated landscape.
l_pts <- poi %>% slice_sample(n = 15)
path <- l_pts %>% summarise(do_union = FALSE) %>% st_cast('LINESTRING')
ggplot() +
ggspatial::annotation_spatial(land_barrier, fill = "cornsilk3", size = 0) +
ggspatial::layer_spatial(poi) +
ggspatial::layer_spatial(path, color = "deepskyblue3") +
ggspatial::layer_spatial(l_pts[1,], color = "darkgreen", size = 4) +
ggspatial::layer_spatial(l_pts[15,], color = "darkred", size = 4) +
theme_void()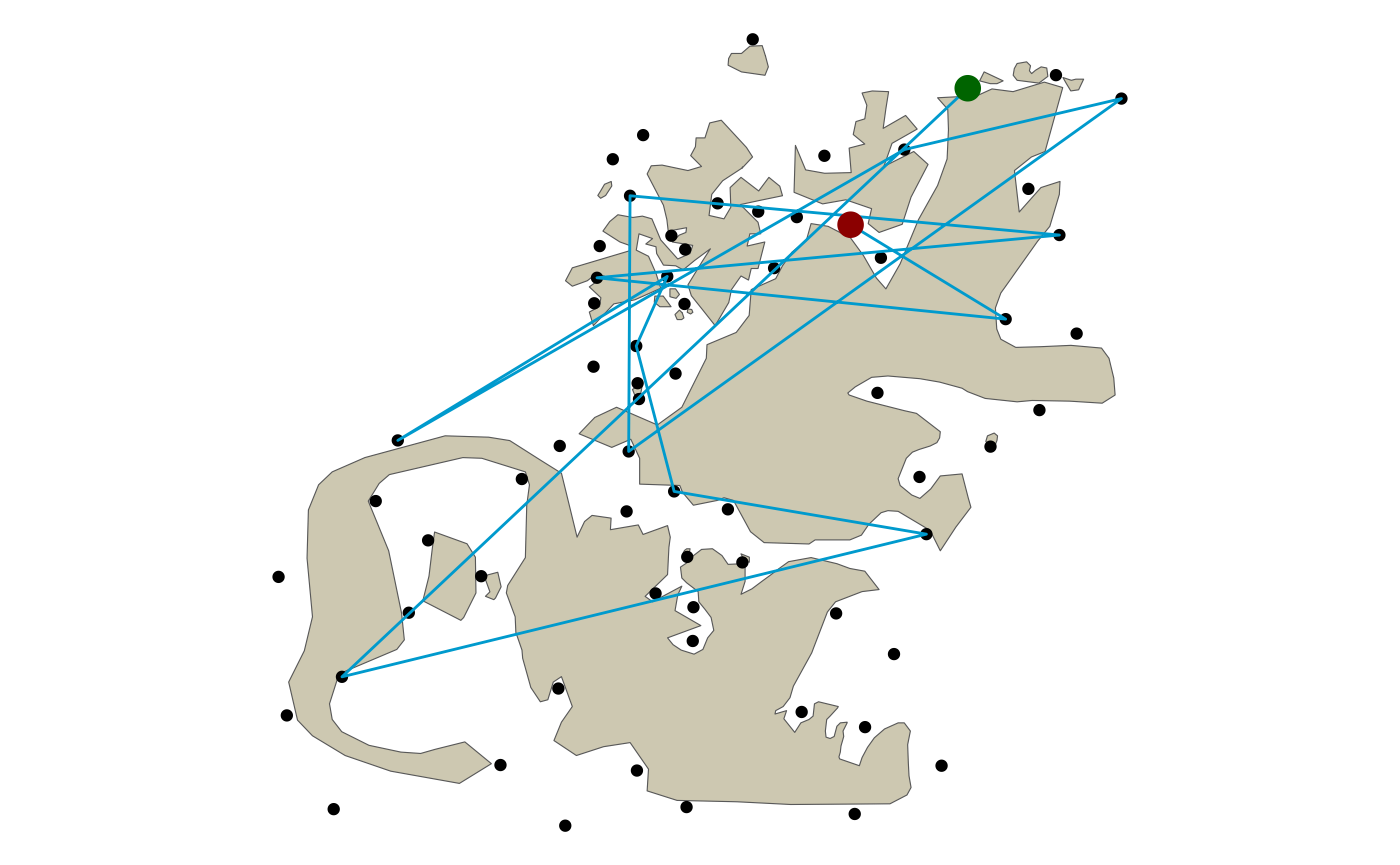
Now, let’s sample 10000 points along this string and this will represent our simulated path of track observations.
track_pts <- st_sample(path, size = 10000, type = "regular")
ggplot() +
ggspatial::annotation_spatial(land_barrier, fill = "cornsilk3", size = 0) +
ggspatial::layer_spatial(path, color = "deepskyblue3") +
ggspatial::layer_spatial(track_pts) +
theme_void()
Re-route the path
The first function we’ll use from the {pathroutr}
package is get_barrier_segments() which identifies all of
the consecutive track points that intersect with the land barrier. The
result of this function is a tibble that stores the key metadata about
each of the segments identified to cross land. The start_idx
and end_idx columns store the row index of the two points that
bookend each stretch of consecutive points that intersect with the
barrier polygon. These points DO NOT intersect with the barrier. The
n_pts column is the number of consecutive points that intersect
with the barrier. Lastly, the start_pt and end_pt
columns store the Simple Feature geometry for the bookend points
represented by start_idx and end_idx. Later, these
geometries will be used to identify the nearest node in our network for
shortest path routing and the final, updated path will start and end
with these geometries.
segs_tbl <- get_barrier_segments(track_pts,land_barrier)
segs_tbl
#> # A tibble: 28 × 6
#> sid start_idx end_idx n_pts start_pt
#> <int> <dbl> <dbl> <dbl> <POINT [m]>
#> 1 1 22 110 87 (66157.77 935452.6)
#> 2 2 556 929 372 (74925.92 939009.7)
#> 3 3 972 980 7 (81756.53 941780.7)
#> 4 4 1123 1501 377 (84235.92 942786.5)
#> 5 5 2261 2607 345 (88290.71 948242.9)
#> 6 6 2974 3000 25 (77804.18 946898.4)
#> 7 7 3213 3547 333 (77344.42 942688.5)
#> 8 8 3589 3742 152 (76473.59 936651.4)
#> 9 9 3819 3853 33 (74165.59 940010.3)
#> 10 10 3921 3929 7 (73816.81 940150.1)
#> # ℹ 18 more rows
#> # ℹ 1 more variable: end_pt <POINT [m]>Our next step is to create a visibility graph. This is, essentially,
a road network for our marine environment. In simple terms, we connect
all of the vertices for our barrier polygon with a Delaunay triangle
mesh and, then, remove any of the edges that cross land. Our
prt_visgraph() function returns an undirected graph of type
sfnetwork created with the sfnetworks package.
Edge lengths are stored as a weight attribute for our visibility
graph.
The most computationally intensive step is likely to be
identification of which edges intersect with the barrier polygon. We try
to minimize this by, first, buffering the barrier by -1 meter and then
calling sf::st_intersect(). Because all of the nodes in our
network are also vertices in our barrier polygon, all edges intersect
with the barrier polygon. By buffering by -1 meter, we disconnect the
nodes. If we didn’t do this, we would need to evaluate two spatial
predicate functions (sf::st_crosses() and
sf::st_within()). With the negative buffer adjustment, we
can rely solely on sf::st_intersect(). The other step we do
to minimize compute time is to NOT evaluate which edges intersect with
the barrier polygon feature. Instead we evaluate which polygon features
intersect with which edges. Because sf::st_intersect()
evaluates row wise, this minimizes the number of evaluations since the
number of polygon features in barrier is always going to be much much
smaller than the number of edges.
vis_graph <- prt_visgraph(land_barrier, buffer = 150)In previous development versions of {pathroutr} we relied on the
{stplanr} package. Now, we rely on {sfnetworks} and one advantage of
this approach is that we can use the
sfnetworks::st_network_blend() function to integrate our
segment start and end points into the network. Previously, the nearest
existing network node to the start/end points was used as the start and
end of the shortest path calculation. A straight line was, then, drawn
between the start/end points to the start and end of the path to
complete the re-routed track segment. The
sfnetworks::st_network_blend() function provides a more
robust solution by creating new network nodes on an existing edge at the
closest point from the provided segment start and end points. These new
network nodes serve as start and end points for the shortest path. And,
as before, we extend the path to include the segment start and end
points.
Additionally, we now also conduct an integrity check of the newly
created LINESTRING to ensure the directionality is
consistent (e.g. the first node in the LINESTRING is the
segment start point). This should resolve any previous issues that
created spurious line segments that diverged from the determined
shortest path.
segs_tbl <- segs_tbl %>% prt_shortpath(vis_graph, blend = TRUE)
ggplot() +
ggspatial::annotation_spatial(land_barrier, fill = "cornsilk3", size = 0) +
ggspatial::layer_spatial(segs_tbl$geometry, color = "deepskyblue3") +
theme_void()
This process of
are likely to be the same across most workflows. So, the
prt_reroute() function exists to simplify the process for
the user. In short, this function calls the two functions above along
with some error handling and data checking. In the example code below
prt_reroute() is followed up with a call to
prt_update_points(). For even more efficient coding, the
%>% function could be used to pipe the result from
prt_reroute() into prt_update_points(). The
result will be a version of track_pts with the re-routed
geometry updated in place. Users may want to construct their own
function for updating points while also tracking which rows were updated
and adjusting other column values as needed.
track_pts_fix <- prt_reroute(track_pts, land_barrier, vis_graph, blend = TRUE)
track_pts_fix <- prt_update_points(track_pts_fix, track_pts)Did it work?
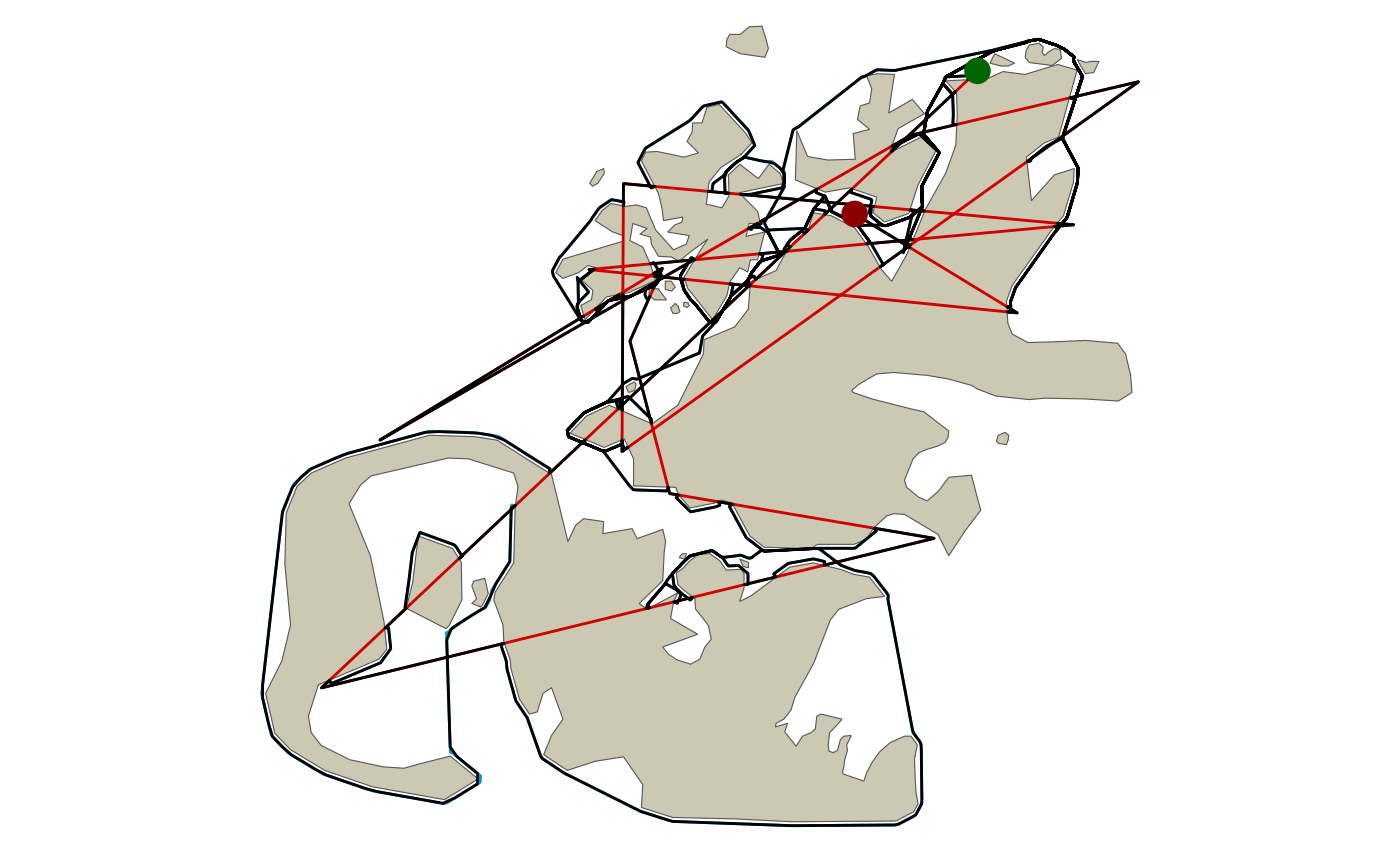
A final plot of our corrected path. The green dot is the start and the red dot then end. The blue line is the shortest path fix and the black line is the new path. Red line represents the original path.
If everything is working correctly, there should not be any black lines crossing land.
track_pts <- track_pts %>% st_cast('LINESTRING')
track_line_fixed <- track_pts_fix %>% summarise(do_union = FALSE) %>% st_cast('LINESTRING')
ggplot() +
ggspatial::annotation_spatial(land_barrier, fill = "cornsilk3", size = 0) +
ggspatial::layer_spatial(track_pts, color = "red3") +
ggspatial::layer_spatial(segs_tbl$geometry, color = "deepskyblue3", size = 2) +
ggspatial::layer_spatial(track_line_fixed) +
ggspatial::layer_spatial(l_pts[1,], color = "darkgreen", size = 4) +
ggspatial::layer_spatial(l_pts[15,], color = "darkred", size = 4) +
theme_void()